T800 impreso en 3D con motor
Introducción
Aparte de las “manualidades” típicas que un romerales suele acometer a lo largo de su vida de curiosidad, nunca había hecho ningún mecanismo mecánico, si bien sí había visto y curioseado muchos con anterioridad. Llevado por la nostalgia al ver mi viejo soldador de punta fina (con 35 años a sus espaldas), la búsqueda de una excusa para imprimir algo y ahora que la IA nos va a reemplazar a todos; se me ocurrió imprimir el busto de un T800 pero que girara la cabeza.
El modelo
Hay muchos sitios donde obtener modelos de bastantes cosas, encontré este modelo del T800 que ya tenía todas las piezas separadas, lo cual facilita mucho el preparar las partes para imprimir:

Sin embargo, no tenía intención de imprimir tantas piezas, por lo que la idea era ensanchar el cuello para que cupiese un rodamiento y el motor y ya.
Impresión de la cabeza
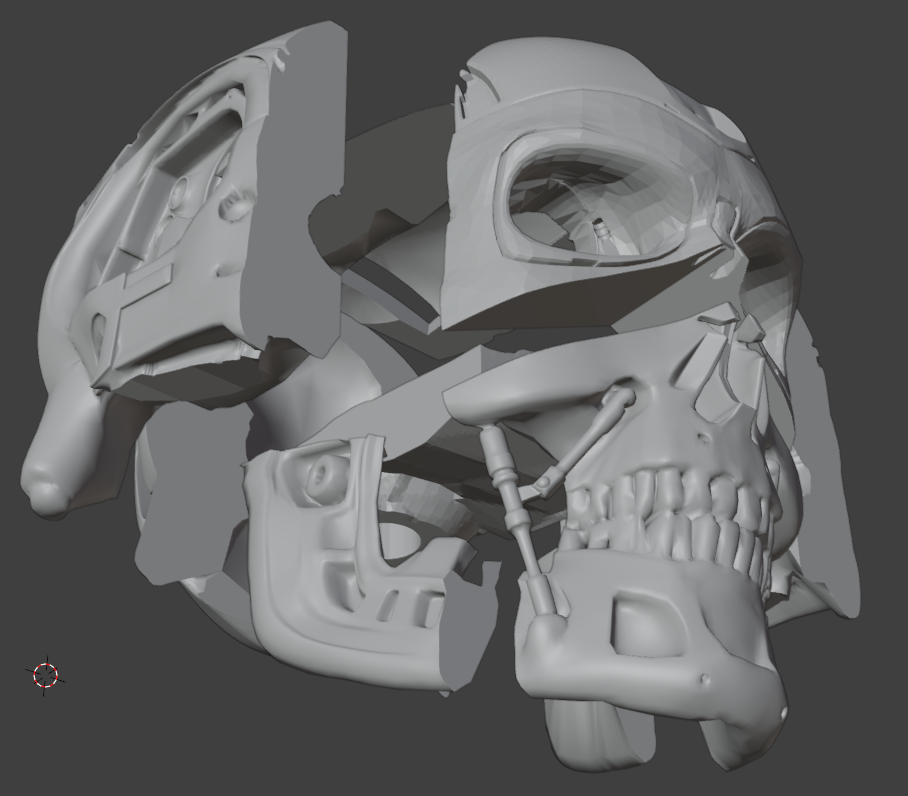
Uniendo y dividiendo piezas, buscamos el encaje adecuado para imprimir en la impresora. Hay cierta práctica aquí (de la que no tengo mucha) a la hora de buscar las mejores divisiones, tamaño, … por ejemplo un problema importante es que las piezas no se imprimen perfectas (debido a cambios en la temperatura mientras se imprimen) por lo que si tienes una pieza que hace de “puente” (por ejemplo la quijada de la imagen) luego no van a encajar por lo que o bien ocultamos la unión (haciendo el corte en otro lugar) o machiembramos la pieza, pues me vi negro para encajarla después (usando abrazaderas y pegando con cola a la vieja usanza).
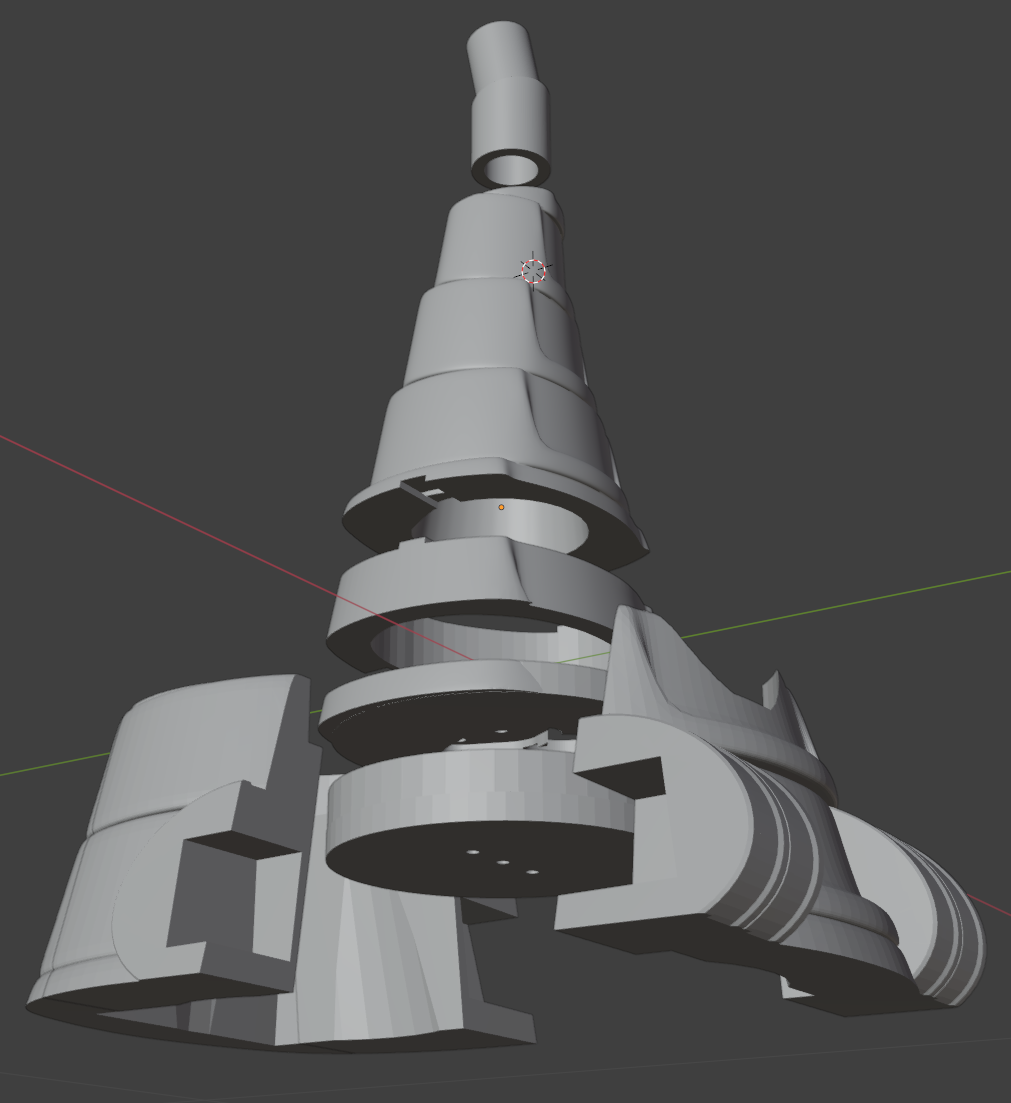
Engranaje del cuello
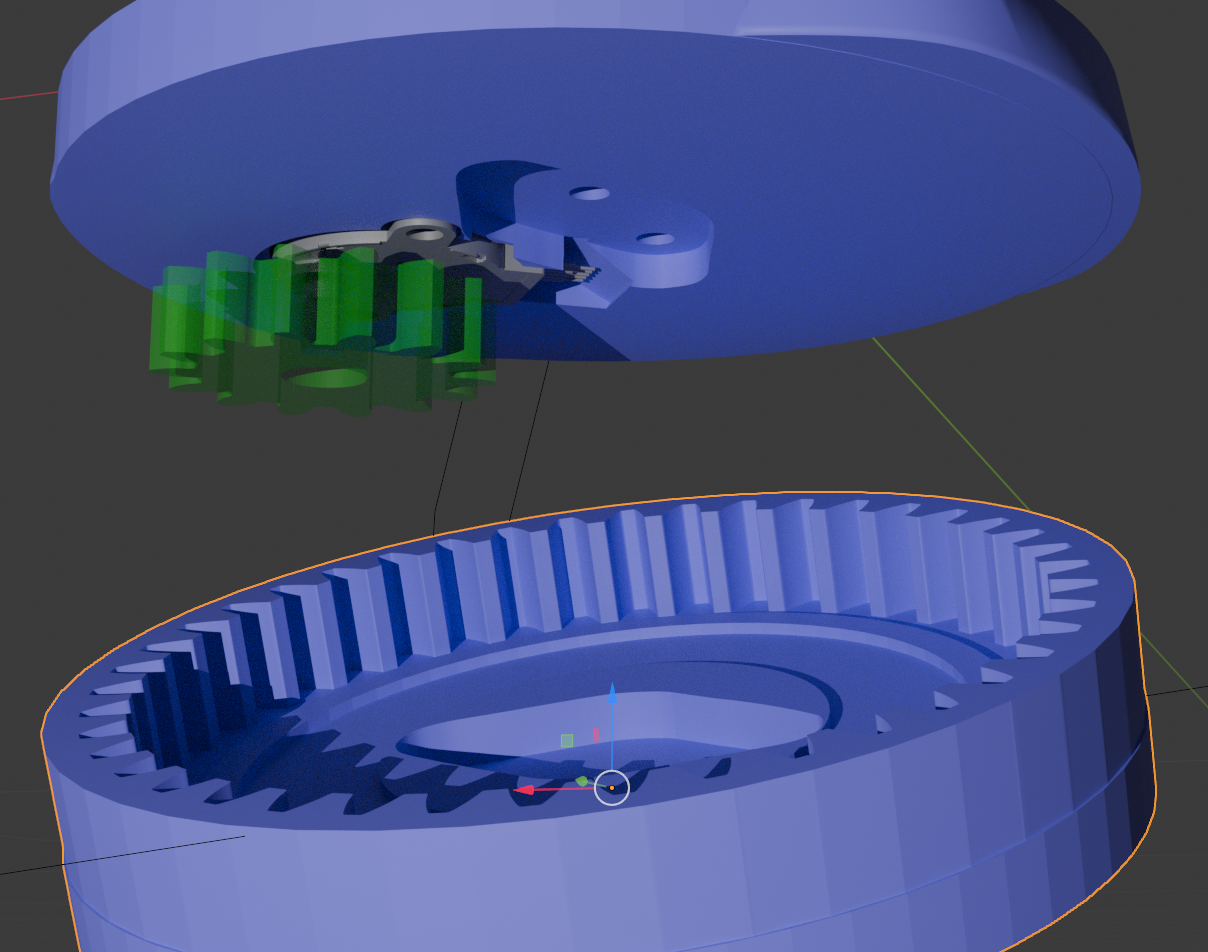
Hacer el cuello fue lo más complicado y divertido de todo el proceso, montón de piezas y restricciones, buscar el tipo de engranaje más adecuado, posición del motor, estrategia de parada de fin de recorrido, etc…
Quedó muy bien y el motor y el engranaje funcionaban perfectamente, el rodamiento y su eje, con poco peso no tenían problema en girar.
Sin embargo, mi ninguna experiencia me hizo ser demasiado optimista en cuanto a la fuerza y holgura angular de los rodamientos que utilicé, que fueron los cojinetes GIAK KFL08:

La cabeza resultó ser demasiado pesada y el cojinete, aunque puse dos unidos por una barra de acero, tenía suficiente holgura angular (poca rigidez radial) como para que el movimiento de precesión fuera demasiado pronunciado y el engranaje apoyara impidiendo el movimiento para el motor.
Sin duda alguien con experiencia lo habría previsto y quizás elegido un rodamiento tipo Slewing Bearing:

El motor
El motor era un sencillo 28BYJ-48 ULN2003:
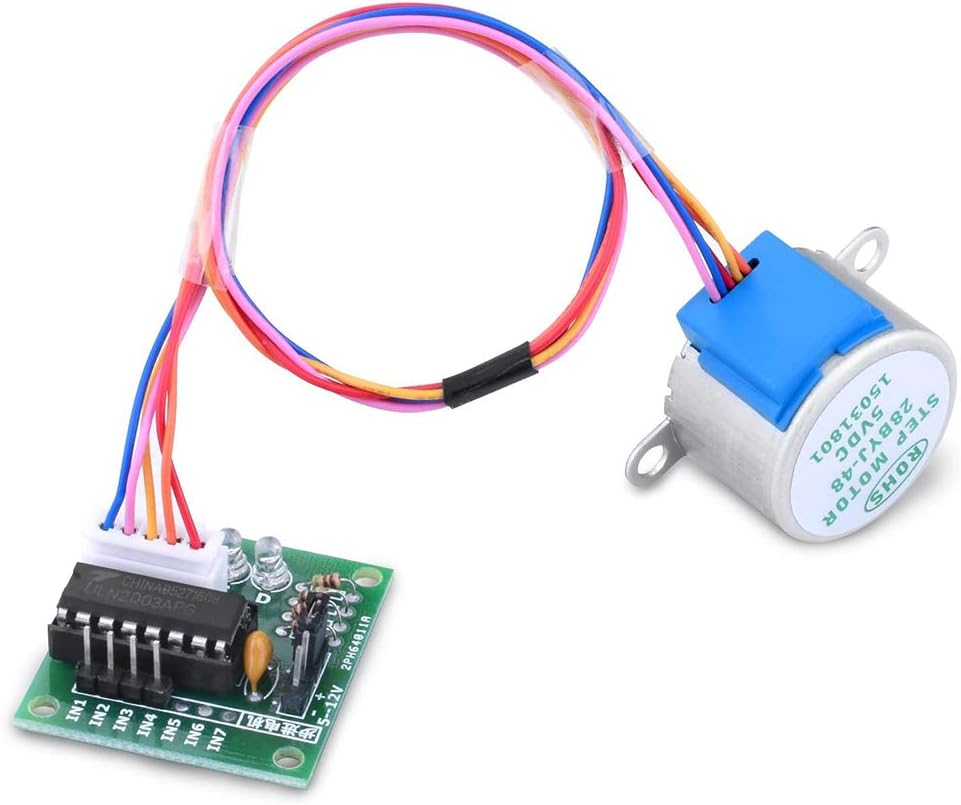
Con suficiente potencia para mover la cabeza… si el cojinete hubiera sido el correcto. En cuanto a la programación es muy sencilla, además, el RP2040 (una Pico Zero) tiene un sensor interno y así podíamos monitorizar si se calentaba mucho:
import time
from machine import Pin
sensor_temp = machine.ADC(4)
conversion_factor = 3.3 / (65535)
IN1 = Pin(0,Pin.OUT)
IN2 = Pin(1,Pin.OUT)
IN3 = Pin(2,Pin.OUT)
IN4 = Pin(3,Pin.OUT)
pins = [IN1, IN2, IN3, IN4]
steps_forward = [
[IN1],
[IN1, IN2],
[IN2],
[IN2, IN3],
[IN3],
[IN3, IN4],
[IN4],
[IN4, IN1],
]
steps_backward = steps_forward[::-1]
current_step = 0
t0 = time.ticks_ms()
def set_pins_low(pins):
[pin.low() for pin in pins]
def set_pins_high(pins):
[pin.high() for pin in pins]
while True:
t = time.ticks_ms() - t0
if int(t / 4000) % 2 == 0:
steps = steps_forward
current_step += 1
else:
steps = steps_backward
if current_step == len(steps):
current_step = 0
high_pins = steps[current_step]
set_pins_low(pins)
set_pins_high(high_pins)
time.sleep_us(3000)
if t % 1000 == 0:
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
print(temperature)
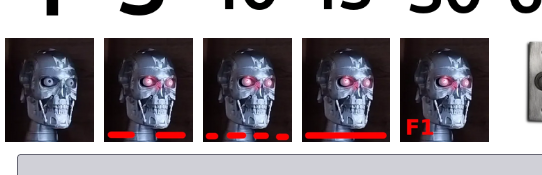
Los ojos LED y control
Lo ideal cuando hablamos del T800 son dos LED rojos de toda la vida, pero con ellos no podíamos controlar la intensidad en un humilde RP2040, podríamos haber puesto dos RGB pero por fortuna, los pines admiten modulación por anchura de pulso (PWM), por lo que controlar la intensidad es inmediato.
Como la idea es poder controlarlo remotamente pero en una estantería, está conectado directamente al HTPC del salón y por tanto se puede leer simplemente de la entrada estándar y así permitir cuatro modos:
- apagado, LEDs apagados.
- pensando, LEDs fluctuando suavemente.
- hablando, LEDs fluctuando rápidamente.
- encendidos, LEDs encendidos continuamente.
import sys
import select
import machine
import time
import math
import random
led = machine.PWM(machine.Pin(11, machine.Pin.OUT))
class TermRead:
def __init__(self):
self.spoll = select.poll()
self.spoll.register(sys.stdin, select.POLLIN)
def read(self):
txt = ''
while self.spoll.poll(0):
txt += sys.stdin.read(1)
return txt
term = TermRead()
t = 0
mode = 1
while True:
txt = term.read().strip()
if txt != '':
if txt == 'off':
mode = 0
if txt == 'pensando':
mode = 1
if txt == 'hablando':
mode = 2
if txt == 'on':
mode = 3
print('****', txt, 'MODE', mode)
time.sleep(0.01)
if mode == 0:
led.duty_u16(0)
if mode == 1:
t = t + 1
k = math.floor(32767 + 32767 * math.cos(0.03 * t))
led.duty_u16(k)
if mode == 2:
t = t + 3 * random.random()
k = math.floor(32767 + 32767 * math.cos(0.3 * t))
led.duty_u16(k)
if mode == 3:
led.duty_u16(2 * 32767)
Control y sonido
El HTPC del salón en realidad es un pequeño servidor que hace muchas cosas y desde un panel muy ad hoc controlo, entre otras cosas, el T800, pudiendo controlar las luces y predefinir las míticas frases de la película “Terminator”:
Cinco botones son suficientes para controlar este humilde engendro con el siguiente resultado final:
