Blender Cut Disk Tool
A la hora de preparar piezas para imprimir, es habitual tener que trocearlas para que quepan adecuadamente en la cama de la impresora o por cuestiones de reducción u optimización de soportes.
Sin embargo y sorprendentemente, todas las herramientas a mi alcance son toscas torpes y con un control nulo o inexistente sobre el corte. Por ejemplo en Prusa Slicer, debes hacer un corte completo sobre un plano y la forma de elegir el plano es girándolo y moviéndolo lo que hace muy difícil el ajuste e imposible de usar en cortes complejos.
Así que hice el siguiente plugin que funciona en Blender 5.0.
El problema
A veces tenemos piezas complejas que hay que cortar en formas simples con control total, en las que hay brazos largos y bucles que nos interesa cortar de cierta forma.

La solución
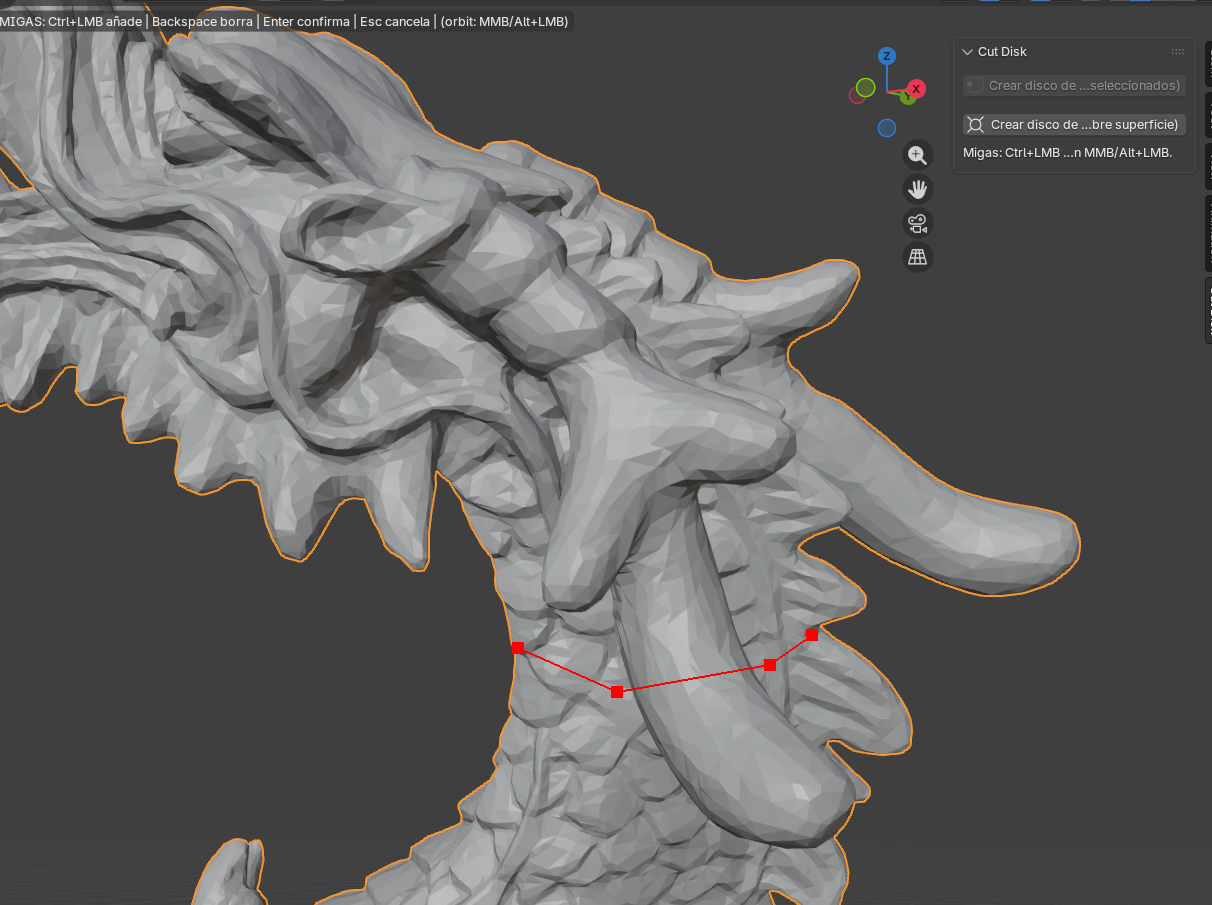
Obligar al usuario a definir un plano o rotarlo y moverlo es un engorro. En su lugar, este addon permite definir un corte a partir de la propia superficie local en la que queremos hacer el corte. Básicamente nos permite definir cómodamente un “disco de corte” en el que además le podemos definir cierto grosor de holgura y un machihembrado.
Para definir los puntos simplemente rodeamos más o menos la zona que queremos cortar. Sobre esos puntos se creará el convex hull que definirá el disco de corte y ya está.
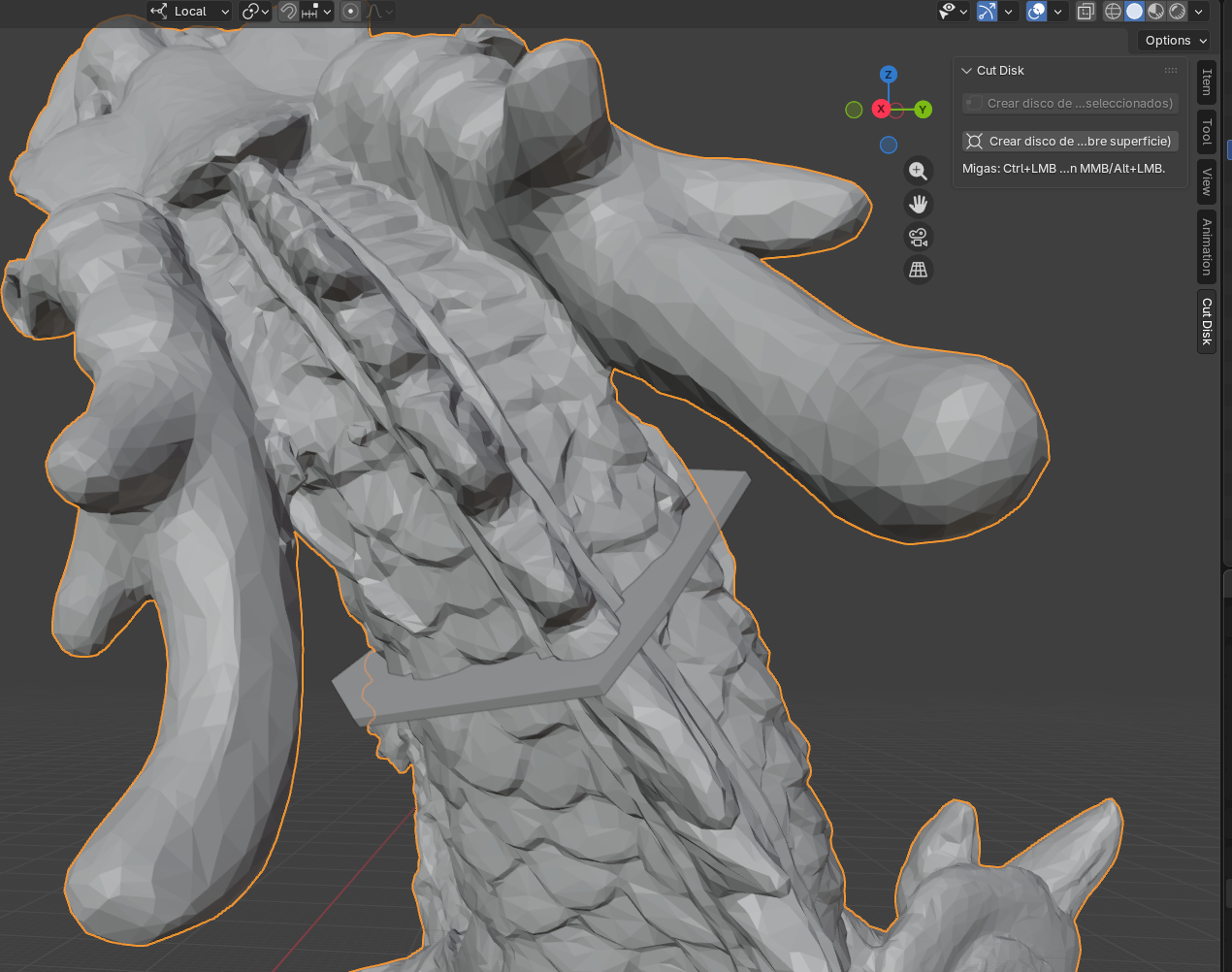
Nos habrá creado una nueva pieza (el disco de corte con o sin machihembrado) en que, por ejemplo, puede haber muy cerca otras partes de la geometría (los cuernos del dragón) que no afectan al corte ni se ven afectados por él.
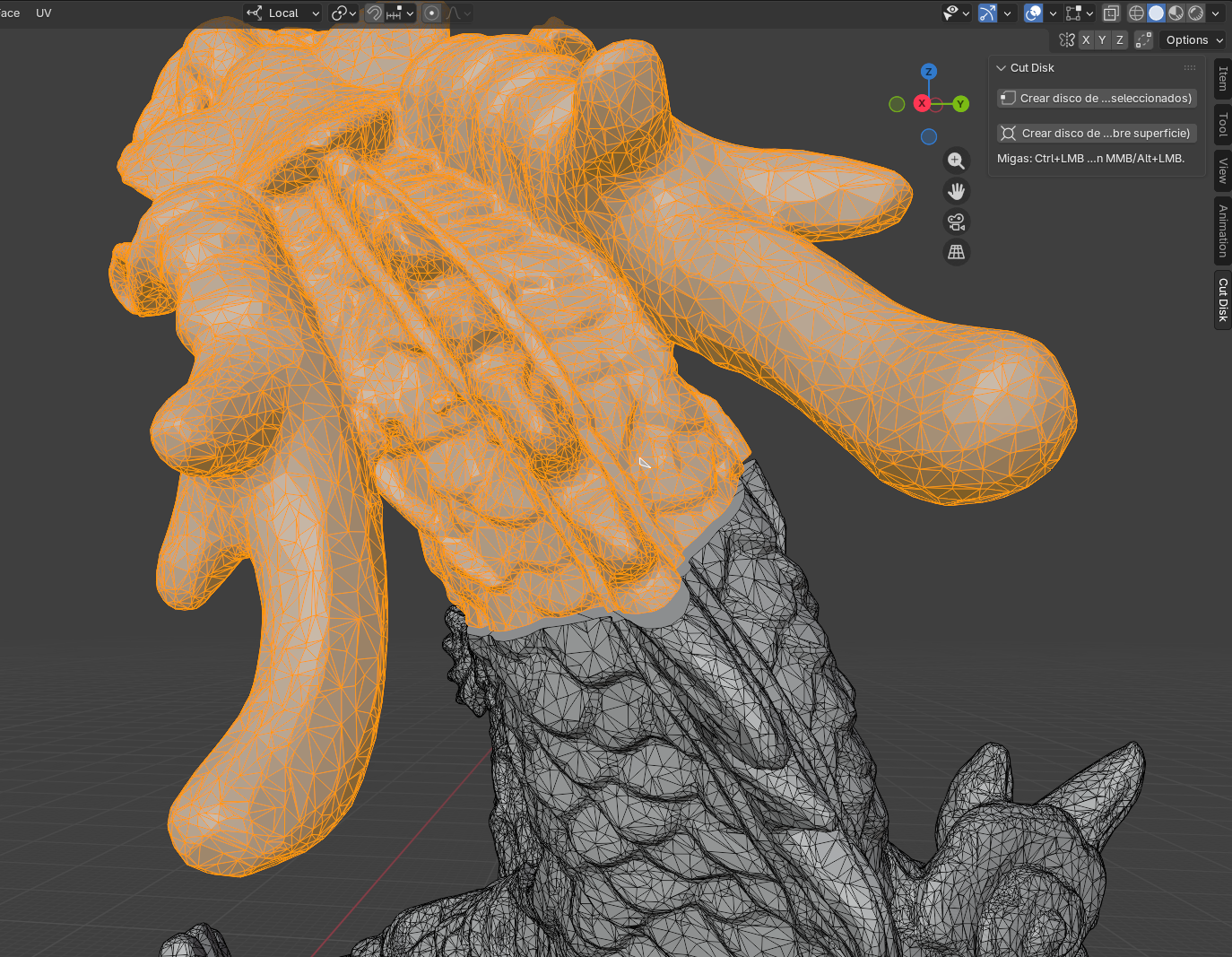
Con esa pieza simplemente hacemos un booleano de resta (difference) sobre la pieza original y listo.
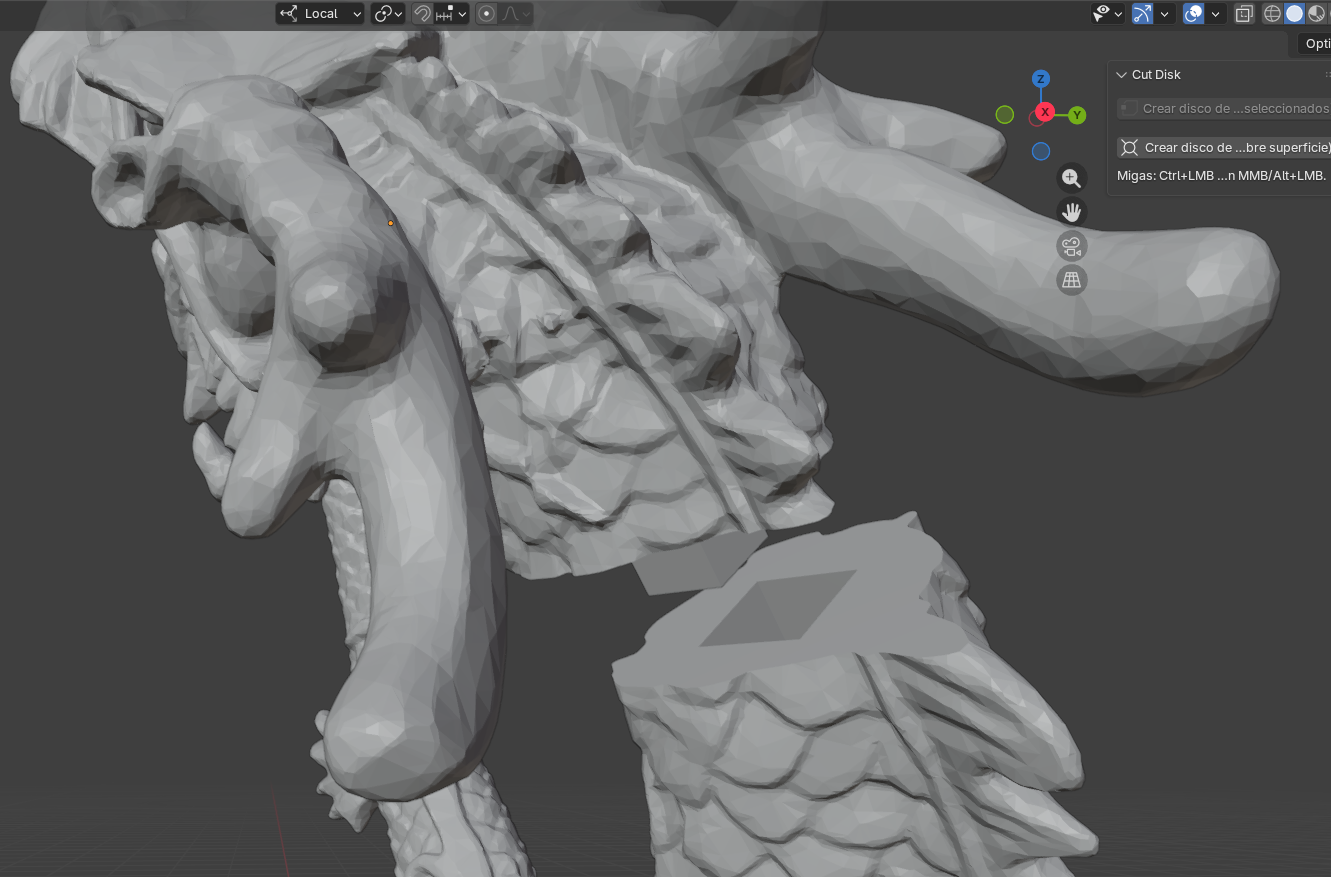
Ya tenemos la geometría separada, con holgura para el grosor del PLA (u otro material) y con un machihembrado que nos permite unir las piezas fácilmente.
El script
Sin más el script del addon, revisa que es seguro, guárdalo en un fichero e instálalo en Blender.
bl_info = {
"name": "Cut Disk Tool (Verts + Breadcrumbs + Hat + Remesh)",
"author": "Jose",
"version": (1, 6, 2),
"blender": (5, 0, 0),
"location": "View3D > Sidebar (N) > Cut Disk",
"category": "Mesh",
}
import bpy
import bmesh
import json
from math import atan2, sqrt
from mathutils import Vector
from bpy.props import FloatProperty, StringProperty, BoolProperty, IntProperty
from bpy_extras import view3d_utils
import gpu
from gpu_extras.batch import batch_for_shader
EPS = 1e-9
# -----------------------------
# Utils
# -----------------------------
def _normalize(v: Vector) -> Vector:
l = v.length
return v if l < EPS else (v / l)
def _best_fit_normal(points_world):
"""Normal por PCA (signo arbitrario) con fallback."""
try:
import numpy as np
P = np.array([[p.x, p.y, p.z] for p in points_world], dtype=float)
M = P.mean(axis=0)
X = P - M
cov = X.T @ X
w, vecs = np.linalg.eigh(cov)
n = vecs[:, 0]
return _normalize(Vector((float(n[0]), float(n[1]), float(n[2]))))
except Exception:
M = sum(points_world, Vector()) / len(points_world)
n = Vector()
for i in range(len(points_world)):
a = points_world[i] - M
b = points_world[(i + 1) % len(points_world)] - M
n += a.cross(b)
if n.length < EPS:
n = Vector((0, 0, 1))
return _normalize(n)
def _stabilize_normal_sign(n: Vector) -> Vector:
ax, ay, az = abs(n.x), abs(n.y), abs(n.z)
if ax >= ay and ax >= az:
return n if n.x >= 0 else -n
if ay >= ax and ay >= az:
return n if n.y >= 0 else -n
return n if n.z >= 0 else -n
def _make_plane_basis(n: Vector):
up = Vector((0, 0, 1)) if abs(n.z) < 0.9 else Vector((0, 1, 0))
u = _normalize(up.cross(n))
if u.length < EPS:
u = _normalize(Vector((1, 0, 0)).cross(n))
v = _normalize(n.cross(u))
return u, v
def _dedupe_consecutive(points, tol=1e-6):
out = []
for p in points:
if not out or (p - out[-1]).length > tol:
out.append(p)
if len(out) >= 3 and (out[0] - out[-1]).length <= tol:
out.pop()
return out
def _points_to_json(points_world):
return json.dumps([[p.x, p.y, p.z] for p in points_world])
def _points_from_json(s):
if not s:
return []
arr = json.loads(s)
return [Vector((float(x), float(y), float(z))) for x, y, z in arr]
def _get_window_region(context):
for r in context.area.regions:
if r.type == 'WINDOW':
return r
return None
def _mouse_to_window_region_xy(context, event):
region = _get_window_region(context)
if region is None:
return None, None, None
rx = event.mouse_x - region.x
ry = event.mouse_y - region.y
if rx < 0 or ry < 0 or rx >= region.width or ry >= region.height:
return None, None, None
return region, int(rx), int(ry)
def _raycast_active_object_world(context, region, mx, my):
obj = context.active_object
if not obj or obj.type != "MESH":
return None
rv3d = context.space_data.region_3d
origin = view3d_utils.region_2d_to_origin_3d(region, rv3d, (mx, my))
direction = view3d_utils.region_2d_to_vector_3d(region, rv3d, (mx, my)).normalized()
depsgraph = context.evaluated_depsgraph_get()
ok, loc, normal, face_index, hit_obj, _ = context.scene.ray_cast(depsgraph, origin, direction, distance=1.0e18)
if not ok or hit_obj is None:
return None
try:
if hit_obj.original != obj:
return None
except Exception:
if hit_obj.name != obj.name:
return None
return loc.copy()
def _set_active(context, obj):
vl = context.view_layer
vl.objects.active = obj
for o in vl.objects:
o.select_set(False)
obj.select_set(True)
def _apply_boolean(context, target_obj, cutter_obj, operation: str):
mod = target_obj.modifiers.new(name=f"__BOOL_{operation}", type='BOOLEAN')
mod.operation = operation
mod.solver = 'EXACT'
mod.object = cutter_obj
_set_active(context, target_obj)
bpy.ops.object.modifier_apply(modifier=mod.name)
def _apply_remesh_sharp(context, obj, octree_depth: int, scale: float):
"""
Remesh SHARP para hacer el sólido más “watertight” antes del boolean.
"""
if obj is None or obj.type != 'MESH':
return
mod = obj.modifiers.new(name="__REMESH_SHARP", type='REMESH')
# API típica de Blender: mode SHARP
if hasattr(mod, "mode"):
mod.mode = 'SHARP'
if hasattr(mod, "octree_depth"):
mod.octree_depth = int(octree_depth)
if hasattr(mod, "scale"):
mod.scale = float(scale)
# algunas builds tienen sharpness, otras no
if hasattr(mod, "sharpness"):
mod.sharpness = 1.0
_set_active(context, obj)
bpy.ops.object.modifier_apply(modifier=mod.name)
def _delete_object(obj):
if obj is None:
return
if obj.name not in bpy.data.objects:
return
mesh = obj.data
bpy.data.objects.remove(obj, do_unlink=True)
if mesh and mesh.users == 0:
bpy.data.meshes.remove(mesh)
# -----------------------------
# Geometry builders
# -----------------------------
def _create_extruded_polygon_object(context, name, poly3_world, M, n, thickness):
me = bpy.data.meshes.new(name + "_Mesh")
me.from_pydata([tuple(p) for p in poly3_world], [], [list(range(len(poly3_world)))])
me.update()
obj = bpy.data.objects.new(name, me)
context.collection.objects.link(obj)
bm2 = bmesh.new()
bm2.from_mesh(me)
bm2.faces.ensure_lookup_table()
if not bm2.faces:
bm2.free()
raise RuntimeError("No se creó la cara del disco (polígono degenerado).")
face = bm2.faces[0]
res = bmesh.ops.extrude_face_region(bm2, geom=[face])
extruded_verts = [e for e in res["geom"] if isinstance(e, bmesh.types.BMVert)]
bmesh.ops.translate(bm2, verts=extruded_verts, vec=n * thickness)
bmesh.ops.translate(bm2, verts=list(bm2.verts), vec=-n * (thickness * 0.5))
bmesh.ops.recalc_face_normals(bm2, faces=list(bm2.faces))
bm2.to_mesh(me)
bm2.free()
return obj
def _create_box_prism(context, name, u, v, size_u, size_v, height, base_on_plane_world, height_dir_world):
hu = size_u * 0.5
hv = size_v * 0.5
b0 = base_on_plane_world + u * (-hu) + v * (-hv)
b1 = base_on_plane_world + u * ( hu) + v * (-hv)
b2 = base_on_plane_world + u * ( hu) + v * ( hv)
b3 = base_on_plane_world + u * (-hu) + v * ( hv)
top_off = _normalize(height_dir_world) * height
t0 = b0 + top_off
t1 = b1 + top_off
t2 = b2 + top_off
t3 = b3 + top_off
verts = [b0, b1, b2, b3, t0, t1, t2, t3]
faces = [
[0, 1, 2, 3],
[4, 5, 6, 7],
[0, 1, 5, 4],
[1, 2, 6, 5],
[2, 3, 7, 6],
[3, 0, 4, 7],
]
me = bpy.data.meshes.new(name + "_Mesh")
me.from_pydata([tuple(p) for p in verts], [], faces)
me.update()
obj = bpy.data.objects.new(name, me)
context.collection.objects.link(obj)
return obj
def _convex_hull_2d(points_xy):
"""
Devuelve el convex hull (CCW) usando monotonic chain.
points_xy: iterable de (x,y)
"""
pts = list(points_xy)
# Dedupe exacta
uniq = []
seen = set()
for x, y in pts:
k = (float(x), float(y))
if k in seen:
continue
seen.add(k)
uniq.append(k)
if len(uniq) < 3:
return uniq
uniq.sort() # (x,y)
def cross(o, a, b):
return (a[0] - o[0]) * (b[1] - o[1]) - (a[1] - o[1]) * (b[0] - o[0])
lower = []
for p in uniq:
while len(lower) >= 2 and cross(lower[-2], lower[-1], p) <= 0.0:
lower.pop()
lower.append(p)
upper = []
for p in reversed(uniq):
while len(upper) >= 2 and cross(upper[-2], upper[-1], p) <= 0.0:
upper.pop()
upper.append(p)
hull = lower[:-1] + upper[:-1]
return hull
def _create_mesh_object_from_bmesh(context, name: str, bm: bmesh.types.BMesh):
me = bpy.data.meshes.new(name + "_Mesh")
bm.to_mesh(me)
bm.free()
me.update()
obj = bpy.data.objects.new(name, me)
context.collection.objects.link(obj)
return obj
def _bm_add_tri(bm, v1, v2, v3, desired_normal: Vector):
# Crea triángulo, corrigiendo winding según desired_normal.
p1, p2, p3 = v1.co, v2.co, v3.co
n = (p2 - p1).cross(p3 - p1)
if n.dot(desired_normal) < 0.0:
v2, v3 = v3, v2
try:
bm.faces.new((v1, v2, v3))
except ValueError:
# Cara duplicada o degenerada: ignorar.
pass
def _bm_add_quad_as_tris(bm, a, b, c, d, desired_normal: Vector):
# Quad (a,b,c,d) en ese orden, partido en dos triángulos.
_bm_add_tri(bm, a, b, c, desired_normal)
_bm_add_tri(bm, a, c, d, desired_normal)
def _quad_corner_order_and_label_fn(view_dir: Vector, n_ref: Vector):
"""
Para un cuadrilátero axis-aligned (u,v) centrado en 0,
devuelve:
- order: lista de índices de corners en orden CCW visto desde view_dir
- label_fn(x,y)-> idx corner más "natural" (por cuadrantes) consistente con ese orden
Corners base en 2D:
A: (+,+)
B: (-,+)
C: (-,-)
D: (+,-)
"""
ccw = (view_dir.dot(n_ref) >= 0.0)
if ccw:
# A,B,C,D
order = (0, 1, 2, 3)
def label_fn(x, y):
if x >= 0.0 and y >= 0.0:
return 0 # A
if x < 0.0 and y >= 0.0:
return 1 # B
if x < 0.0 and y < 0.0:
return 2 # C
return 3 # D
else:
# CW en 2D para que sea CCW visto desde -n: A,D,C,B
order = (0, 3, 2, 1)
def label_fn(x, y):
if x >= 0.0 and y >= 0.0:
return 0 # A
if x >= 0.0 and y < 0.0:
return 1 # D (pero en esta permutación es idx=1)
if x < 0.0 and y < 0.0:
return 2 # C
return 3 # B
return order, label_fn
def _triangulate_ring_outer_to_inner_quad(bm, *, outer_verts, outer_xy, inner_verts, inner_xy, outward: Vector, n_ref: Vector):
"""
Triangula una "corona" convexa entre un outer loop (convexo) y un inner loop cuadrilateral,
usando el esquema por cuadrantes (equivalente a 'más cercano' en la práctica).
outer_xy debe estar en CCW en 2D respecto a +n_ref.
outward es la normal exterior deseada de la cara (±d).
"""
if len(outer_verts) != len(outer_xy):
raise RuntimeError("outer_verts/outer_xy desalineados.")
order, label_fn = _quad_corner_order_and_label_fn(outward, n_ref)
# Reordenar outer para que sea CCW visto desde outward
outer_idx = list(range(len(outer_xy)))
if outward.dot(n_ref) < 0.0:
outer_idx.reverse()
# Inner verts en orden CCW visto desde outward
inner_ord = [inner_verts[i] for i in order]
inner_xy_ord = [inner_xy[i] for i in order]
# Labels por cuadrantes (consistentes con inner_ord)
labels = []
for i in outer_idx:
x, y = outer_xy[i]
labels.append(label_fn(x, y))
# Triangulación (buffer circular)
m = len(outer_idx)
for t in range(m):
i = outer_idx[t]
j = outer_idx[(t + 1) % m]
ki = labels[t]
kj = labels[(t + 1) % m]
vi = outer_verts[i]
vj = outer_verts[j]
if ki == kj:
_bm_add_tri(bm, inner_ord[ki], vi, vj, outward)
else:
# puente entre corners adyacentes
_bm_add_tri(bm, inner_ord[ki], vi, inner_ord[kj], outward)
_bm_add_tri(bm, inner_ord[kj], vi, vj, outward)
def _create_disk_hat_direct(context, *,
name: str,
hull_xy, # CCW en 2D respecto a +n
M: Vector,
n: Vector,
u: Vector,
v: Vector,
thickness: float,
L: float,
hat_on_positive_side: bool):
"""
Construcción determinista, sin booleans:
- Disco convexo (hull) extruido thickness centrado en M
- Sombrero: cubo (solo caras exteriores) emergiendo desde la tapa "d"
- Hueco interno: prisma rectangular (caras internas) abierto por la tapa contraria
"""
H = thickness
d = n if hat_on_positive_side else -n
if L <= 2.0 * H + 1e-12:
# Sin sombrero: cae a disco simple.
poly3 = [M + u * x + v * y for x, y in hull_xy]
return _create_extruded_polygon_object(context, name, poly3, M, n, H)
side_inner = L - 2.0 * H
if side_inner <= 0.0 + 1e-12:
poly3 = [M + u * x + v * y for x, y in hull_xy]
return _create_extruded_polygon_object(context, name, poly3, M, n, H)
# Planos en d
z0 = M - 0.5 * H * d # tapa contraria al sombrero (apertura hueco)
z1 = M + 0.5 * H * d # tapa hacia donde sale el sombrero (emerge cubo)
z2 = z0 + (L - H) * d # techo interior (cara inferior del techo)
z3 = z0 + L * d # tapa superior del cubo
# Outer hull verts (en ambos planos del disco)
outer_xy = list(hull_xy)
N = len(outer_xy)
bm = bmesh.new()
outer0 = []
outer1 = []
for x, y in outer_xy:
outer0.append(bm.verts.new(z0 + u * x + v * y))
outer1.append(bm.verts.new(z1 + u * x + v * y))
# Square (cubo) corners en z1 y z3
hL = 0.5 * L
# A(+,+), B(-,+), C(-,-), D(+,-)
sq2d = [(+hL, +hL), (-hL, +hL), (-hL, -hL), (+hL, -hL)]
square1 = [bm.verts.new(z1 + u * x + v * y) for x, y in sq2d]
square3 = [bm.verts.new(z3 + u * x + v * y) for x, y in sq2d]
# Rect (hueco) corners en z0 y z2
hI = 0.5 * side_inner
rc2d = [(+hI, +hI), (-hI, +hI), (-hI, -hI), (+hI, -hI)]
rect0 = [bm.verts.new(z0 + u * x + v * y) for x, y in rc2d]
rect2 = [bm.verts.new(z2 + u * x + v * y) for x, y in rc2d]
bm.verts.ensure_lookup_table()
# ---- Caras exteriores del disco ----
# Paredes exteriores (hull) entre z0 y z1
for i in range(N):
j = (i + 1) % N
a, b, c, ddd = outer0[i], outer0[j], outer1[j], outer1[i]
# Normal aproximada radial hacia fuera
mid = (a.co + b.co + c.co + ddd.co) * 0.25
radial = (mid - M) - n * ((mid - M).dot(n))
desired = radial.normalized() if radial.length > EPS else Vector((0, 0, 0))
_bm_add_quad_as_tris(bm, a, b, c, ddd, desired)
# Tapa inferior (z0): hull con agujero rect0, outward = -d
_triangulate_ring_outer_to_inner_quad(
bm,
outer_verts=outer0,
outer_xy=outer_xy,
inner_verts=rect0,
inner_xy=rc2d,
outward=-d,
n_ref=n
)
# Tapa superior del disco (z1): hull con agujero square1, outward = +d
_triangulate_ring_outer_to_inner_quad(
bm,
outer_verts=outer1,
outer_xy=outer_xy,
inner_verts=square1,
inner_xy=sq2d,
outward=+d,
n_ref=n
)
# ---- Caras exteriores del cubo (sombrero) ----
# Paredes del cubo desde z1 hasta z3 (4 caras)
for i in range(4):
j = (i + 1) % 4
a, b, c, ddd = square1[i], square1[j], square3[j], square3[i]
mid = (a.co + b.co + c.co + ddd.co) * 0.25
radial = (mid - M) - n * ((mid - M).dot(n))
desired = radial.normalized() if radial.length > EPS else Vector((0, 0, 0))
_bm_add_quad_as_tris(bm, a, b, c, ddd, desired)
# Tapa superior del cubo (z3): square3, outward = +d
_bm_add_quad_as_tris(bm, square3[0], square3[1], square3[2], square3[3], +d)
# ---- Caras internas del hueco rectangular ----
# Paredes internas (4 caras) desde z0 hasta z2: normales hacia el interior del hueco
for i in range(4):
j = (i + 1) % 4
# OJO: para que la normal apunte hacia dentro del hueco, invertimos el quad.
a, b, c, ddd = rect0[j], rect0[i], rect2[i], rect2[j]
mid = (a.co + b.co + c.co + ddd.co) * 0.25
radial_in = (M - mid) - n * ((M - mid).dot(n))
desired = radial_in.normalized() if radial_in.length > EPS else Vector((0, 0, 0))
_bm_add_quad_as_tris(bm, a, b, c, ddd, desired)
# Techo del hueco (cara "inferior" del techo), en z2: rect2, outward hacia el hueco = -d
_bm_add_quad_as_tris(bm, rect2[0], rect2[1], rect2[2], rect2[3], -d)
# Normales coherentes
bmesh.ops.recalc_face_normals(bm, faces=list(bm.faces))
return _create_mesh_object_from_bmesh(context, name, bm)
def _scale_object_mesh_in_plane(obj, M, u, v, n, scale_in_plane: float):
if abs(scale_in_plane - 1.0) < 1e-12:
return
me = obj.data
bm = bmesh.new()
bm.from_mesh(me)
for vert in bm.verts:
p = Vector(vert.co)
d = p - M
cu = d.dot(u)
cv = d.dot(v)
cn = d.dot(n)
vert.co = M + u * (cu * scale_in_plane) + v * (cv * scale_in_plane) + n * cn
bm.to_mesh(me)
bm.free()
me.update()
# -----------------------------
# Core: create cutter from points (with hat)
# -----------------------------
def create_cut_disk_from_points(context, *,
points_world,
thickness: float,
scale_in_plane: float,
obj_name: str,
show_in_front: bool,
wire: bool,
order_mode: str,
make_hat: bool,
hat_square_ratio: float,
hat_on_positive_side: bool,
remesh_before_boolean: bool,
remesh_octree_depth: int,
remesh_scale: float):
if len(points_world) < 3:
raise RuntimeError("Necesitas al menos 3 puntos.")
pts = _dedupe_consecutive(points_world)
if len(pts) < 3:
raise RuntimeError("Tras limpiar puntos repetidos, no queda polígono válido.")
M = sum(pts, Vector()) / len(pts)
n = _best_fit_normal(pts)
if n.length < EPS:
raise RuntimeError("No pude calcular una normal válida.")
n = _stabilize_normal_sign(n)
u, v = _make_plane_basis(n)
# Proyectar a plano + coords 2D
pts2 = []
for p in pts:
d = (p - M).dot(n)
pp = p - n * d
x = (pp - M).dot(u)
y = (pp - M).dot(v)
pts2.append((x, y))
# Radio estimado
R = 0.0
for x, y in pts2:
R = max(R, sqrt(x * x + y * y))
# Orden / contorno
if make_hat:
hull_xy = _convex_hull_2d(pts2)
if len(hull_xy) < 3:
raise RuntimeError("Convex hull inválido (puntos degenerados).")
# Recentrar M al "centro de masas" del hull (centroide 2D area-weighted)
A = 0.0
cx = 0.0
cy = 0.0
for i in range(len(hull_xy)):
x0, y0 = hull_xy[i]
x1, y1 = hull_xy[(i + 1) % len(hull_xy)]
cr = x0 * y1 - x1 * y0
A += cr
cx += (x0 + x1) * cr
cy += (y0 + y1) * cr
if abs(A) > EPS:
cx /= (3.0 * A)
cy /= (3.0 * A)
else:
cx = sum(x for x, _ in hull_xy) / len(hull_xy)
cy = sum(y for _, y in hull_xy) / len(hull_xy)
M = M + u * cx + v * cy
hull_xy = [(x - cx, y - cy) for x, y in hull_xy]
# Recalcular radio con el hull ya centrado
R = 0.0
for x, y in hull_xy:
R = max(R, sqrt(x * x + y * y))
poly3 = [M + u * x + v * y for x, y in hull_xy]
else:
if order_mode == "ANGLE":
cx = sum(x for x, _ in pts2) / len(pts2)
cy = sum(y for _, y in pts2) / len(pts2)
order = sorted(range(len(pts2)), key=lambda i: atan2(pts2[i][1] - cy, pts2[i][0] - cx))
else:
order = list(range(len(pts2)))
poly3 = [M + u * pts2[i][0] + v * pts2[i][1] for i in order]
poly3 = _dedupe_consecutive(poly3)
if len(poly3) < 3:
raise RuntimeError("Polígono inválido.")
# Guardar estado
prev_mode = context.mode
prev_active = context.view_layer.objects.active
prev_sel = [o for o in context.selected_objects]
if context.mode != 'OBJECT':
bpy.ops.object.mode_set(mode='OBJECT')
# 1) Disco (y sombrero determinista, sin booleans)
if make_hat:
diameter = max(2.0 * R, EPS)
L = max(hat_square_ratio * diameter, EPS)
# hull_xy viene del bloque de orden cuando make_hat=True
disk_obj = _create_disk_hat_direct(
context,
name=obj_name,
hull_xy=hull_xy,
M=M, n=n, u=u, v=v,
thickness=thickness,
L=L,
hat_on_positive_side=hat_on_positive_side
)
# Remesh (si se pidió): ahora se aplica AL FINAL, porque no hay booleans
if remesh_before_boolean:
_apply_remesh_sharp(context, disk_obj, remesh_octree_depth, remesh_scale)
else:
disk_obj = _create_extruded_polygon_object(context, obj_name, poly3, M, n, thickness)
# 3) Escalar en el plano al final
_scale_object_mesh_in_plane(disk_obj, M, u, v, n, scale_in_plane)
# Visual
disk_obj.show_in_front = bool(show_in_front)
disk_obj.display_type = 'WIRE' if wire else 'SOLID'
# Restaurar selección/activo y modo
for o in context.view_layer.objects:
o.select_set(False)
for o in prev_sel:
if o and o.name in bpy.data.objects:
o.select_set(True)
if prev_active and prev_active.name in bpy.data.objects:
context.view_layer.objects.active = bpy.data.objects[prev_active.name]
if prev_mode == 'EDIT_MESH':
bpy.ops.object.mode_set(mode='EDIT')
return disk_obj
# -----------------------------
# Operator 1: from selected verts
# -----------------------------
def _selected_verts_world(context):
obj = context.active_object
if not obj or obj.type != "MESH":
raise RuntimeError("El objeto activo no es una malla.")
if context.mode != "EDIT_MESH":
raise RuntimeError("Debes estar en Edit Mode.")
bm = bmesh.from_edit_mesh(obj.data)
sel = [v for v in bm.verts if v.select]
if len(sel) < 3:
raise RuntimeError("Selecciona al menos 3 vértices.")
mw = obj.matrix_world
return [mw @ v.co for v in sel]
class MESH_OT_cut_disk_from_verts(bpy.types.Operator):
bl_idname = "mesh.cut_disk_from_verts"
bl_label = "Crear disco de corte (vértices seleccionados)"
bl_options = {'REGISTER', 'UNDO'}
preview: BoolProperty(name="Preview", default=True)
thickness: FloatProperty(name="Holgura H (grosor)", default=0.02, min=0.000001, unit='LENGTH')
scale_in_plane: FloatProperty(name="Inflado S (en el plano)", default=1.05, min=0.000001)
obj_name: StringProperty(name="Nombre", default="CutDisk")
show_in_front: BoolProperty(name="In Front", default=False)
wire: BoolProperty(name="Wire", default=False)
angle_order: BoolProperty(name="Ordenar por ángulo", default=True)
make_hat: BoolProperty(name="Hat (sombrero)", default=False)
hat_square_ratio: FloatProperty(name="Tamaño cubo (%)", default=0.30, min=0.01, max=2.0)
hat_on_positive_side: BoolProperty(name="Sombrero hacia +normal", default=True)
remesh_before_boolean: BoolProperty(name="Remesh Sharp antes de boolean", default=True)
remesh_octree_depth: IntProperty(name="Remesh Octree Depth", default=7, min=4, max=10)
remesh_scale: FloatProperty(name="Remesh Scale", default=0.99, min=0.1, max=1.0)
@classmethod
def poll(cls, context):
o = context.active_object
return o and o.type == "MESH" and context.mode == "EDIT_MESH"
def invoke(self, context, event):
return self.execute(context)
def draw(self, context):
l = self.layout
l.prop(self, "preview")
col = l.column()
col.enabled = self.preview
col.prop(self, "thickness")
col.prop(self, "scale_in_plane")
col.prop(self, "angle_order")
col.prop(self, "obj_name")
col.prop(self, "show_in_front")
col.prop(self, "wire")
l.separator()
l.prop(self, "make_hat")
h = l.column()
h.enabled = self.make_hat
h.prop(self, "hat_square_ratio")
h.prop(self, "hat_on_positive_side")
h.separator()
h.prop(self, "remesh_before_boolean")
rr = h.column()
rr.enabled = self.make_hat and self.remesh_before_boolean
rr.prop(self, "remesh_octree_depth")
rr.prop(self, "remesh_scale")
def execute(self, context):
if not self.preview:
return {'FINISHED'}
try:
pts = _selected_verts_world(context)
create_cut_disk_from_points(
context,
points_world=pts,
thickness=self.thickness,
scale_in_plane=self.scale_in_plane,
obj_name=self.obj_name,
show_in_front=self.show_in_front,
wire=self.wire,
order_mode="ANGLE" if self.angle_order else "CLICK",
make_hat=self.make_hat,
hat_square_ratio=self.hat_square_ratio,
hat_on_positive_side=self.hat_on_positive_side,
remesh_before_boolean=self.remesh_before_boolean,
remesh_octree_depth=self.remesh_octree_depth,
remesh_scale=self.remesh_scale,
)
except Exception as e:
self.report({'ERROR'}, str(e))
return {'CANCELLED'}
return {'FINISHED'}
# -----------------------------
# Operator 2: breadcrumbs
# -----------------------------
class MESH_OT_cut_disk_breadcrumbs(bpy.types.Operator):
bl_idname = "mesh.cut_disk_breadcrumbs"
bl_label = "Crear disco de corte (migas sobre superficie)"
bl_options = {'REGISTER', 'UNDO'}
thickness: FloatProperty(name="Holgura H (grosor)", default=0.02, min=0.000001, unit='LENGTH')
scale_in_plane: FloatProperty(name="Inflado S (en el plano)", default=1.05, min=0.000001)
obj_name: StringProperty(name="Nombre", default="CutDisk")
show_in_front: BoolProperty(name="In Front", default=False)
wire: BoolProperty(name="Wire", default=False)
make_hat: BoolProperty(name="Hat (sombrero)", default=False)
hat_square_ratio: FloatProperty(name="Tamaño cubo (%)", default=0.30, min=0.01, max=2.0)
hat_on_positive_side: BoolProperty(name="Sombrero hacia +normal", default=True)
remesh_before_boolean: BoolProperty(name="Remesh Sharp antes de boolean", default=True)
remesh_octree_depth: IntProperty(name="Remesh Octree Depth", default=7, min=4, max=10)
remesh_scale: FloatProperty(name="Remesh Scale", default=0.99, min=0.1, max=1.0)
points_json: StringProperty(name="(interno) puntos", default="[]")
@classmethod
def poll(cls, context):
o = context.active_object
return o and o.type == "MESH" and context.area and context.area.type == "VIEW_3D"
def _draw_callback(self):
pts = getattr(self, "_points", None)
if not pts:
return
shader = gpu.shader.from_builtin('UNIFORM_COLOR')
# Mostrar siempre por delante (sin z-buffer)
gpu.state.depth_test_set('NONE')
gpu.state.depth_mask_set(False)
gpu.state.blend_set('ALPHA')
gpu.state.point_size_set(12.0)
try:
gpu.state.line_width_set(2.0)
except Exception:
pass
coords = [p.to_tuple() for p in pts]
shader.bind()
shader.uniform_float("color", (1, 0, 0, 1))
# Path del usuario
batch = batch_for_shader(shader, 'LINE_STRIP', {"pos": coords})
batch.draw(shader)
# Puntos
batch_p = batch_for_shader(shader, 'POINTS', {"pos": coords})
batch_p.draw(shader)
# Restaurar estado
gpu.state.blend_set('NONE')
gpu.state.depth_mask_set(True)
gpu.state.depth_test_set('LESS_EQUAL')
def _start_preview(self, context):
if getattr(self, "_handle", None) is None:
self._handle = bpy.types.SpaceView3D.draw_handler_add(
self._draw_callback, (), 'WINDOW', 'POST_VIEW'
)
context.area.tag_redraw()
def _stop_preview(self, context):
h = getattr(self, "_handle", None)
if h is not None:
bpy.types.SpaceView3D.draw_handler_remove(h, 'WINDOW')
self._handle = None
if context.area:
context.area.tag_redraw()
def _finish(self, context):
self._stop_preview(context)
if context.area:
context.area.header_text_set(None)
context.window.cursor_modal_restore()
def invoke(self, context, event):
self._points = []
self._handle = None
self.points_json = "[]"
self._start_preview(context)
context.window.cursor_modal_set('CROSSHAIR')
if context.area:
context.area.header_text_set(
"MODO MIGAS: Ctrl+LMB añade | Backspace borra | Enter confirma | Esc cancela | (orbit: MMB/Alt+LMB)"
)
context.window_manager.modal_handler_add(self)
return {'RUNNING_MODAL'}
def modal(self, context, event):
if event.type in {'MIDDLEMOUSE', 'WHEELUPMOUSE', 'WHEELDOWNMOUSE', 'WHEELINMOUSE', 'WHEELOUTMOUSE'}:
return {'PASS_THROUGH'}
if event.alt and event.type in {'LEFTMOUSE', 'RIGHTMOUSE'}:
return {'PASS_THROUGH'}
if event.type == 'ESC' and event.value == 'PRESS':
self._finish(context)
return {'CANCELLED'}
if event.type in {'RET', 'NUMPAD_ENTER'} and event.value == 'PRESS':
if len(self._points) < 3:
self.report({'ERROR'}, "Necesitas al menos 3 migas.")
return {'RUNNING_MODAL'}
self.points_json = _points_to_json(self._points)
self._finish(context)
return self.execute(context)
if event.type == 'BACK_SPACE' and event.value == 'PRESS':
if self._points:
self._points.pop()
self.points_json = _points_to_json(self._points)
if context.area:
context.area.tag_redraw()
return {'RUNNING_MODAL'}
if event.type == 'LEFTMOUSE':
if event.value == 'PRESS' and event.ctrl:
region, mx, my = _mouse_to_window_region_xy(context, event)
if region is not None:
hit = _raycast_active_object_world(context, region, mx, my)
if hit is not None:
self._points.append(hit)
self.points_json = _points_to_json(self._points)
if context.area:
context.area.tag_redraw()
return {'RUNNING_MODAL'}
return {'PASS_THROUGH'}
return {'RUNNING_MODAL'}
def execute(self, context):
try:
pts = _points_from_json(self.points_json)
if len(pts) < 3:
raise RuntimeError("No hay suficientes migas.")
create_cut_disk_from_points(
context,
points_world=pts,
thickness=self.thickness,
scale_in_plane=self.scale_in_plane,
obj_name=self.obj_name,
show_in_front=self.show_in_front,
wire=self.wire,
order_mode="CLICK",
make_hat=self.make_hat,
hat_square_ratio=self.hat_square_ratio,
hat_on_positive_side=self.hat_on_positive_side,
remesh_before_boolean=self.remesh_before_boolean,
remesh_octree_depth=self.remesh_octree_depth,
remesh_scale=self.remesh_scale,
)
except Exception as e:
self.report({'ERROR'}, str(e))
return {'CANCELLED'}
return {'FINISHED'}
# -----------------------------
# UI Panel
# -----------------------------
class VIEW3D_PT_cut_disk_panel(bpy.types.Panel):
bl_label = "Cut Disk"
bl_idname = "VIEW3D_PT_cut_disk_panel"
bl_space_type = 'VIEW_3D'
bl_region_type = 'UI'
bl_category = "Cut Disk"
def draw(self, context):
layout = self.layout
layout.operator("mesh.cut_disk_from_verts", icon='VERTEXSEL')
layout.separator()
layout.operator("mesh.cut_disk_breadcrumbs", icon='CURSOR')
layout.label(text="Migas: Ctrl+LMB para poner puntos; navega con MMB/Alt+LMB.")
classes = (
MESH_OT_cut_disk_from_verts,
MESH_OT_cut_disk_breadcrumbs,
VIEW3D_PT_cut_disk_panel,
)
def register():
for c in classes:
bpy.utils.register_class(c)
def unregister():
for c in reversed(classes):
bpy.utils.unregister_class(c)
if __name__ == "__main__":
register()